有约束条件的多目标黑盒优化#
本教程介绍如何使用OpenBox解决有约束条件的多目标优化问题。
问题设置#
本例中,我们使用带约束的多目标优化问题 CONSTR 作为例子。 OpenBox内置了CONSTR函数,其搜索空间和目标函数被包装如下:
from openbox.benchmark.objective_functions.synthetic import CONSTR
prob = CONSTR()
dim = 2
initial_runs = 2 * (dim + 1)
import numpy as np
from openbox import space as sp
params = {'x1': (0.1, 10.0),
'x2': (0.0, 5.0)}
space = sp.Space()
space.add_variables([sp.Real(k, *v) for k, v in params.items()])
def objective_funtion(config: sp.Configuration):
X = np.array(list(config.get_dictionary().values()))
result = dict()
obj1 = X[..., 0]
obj2 = (1.0 + X[..., 1]) / X[..., 0]
result['objectives'] = np.stack([obj1, obj2], axis=-1)
c1 = 6.0 - 9.0 * X[..., 0] - X[..., 1]
c2 = 1.0 - 9.0 * X[..., 0] + X[..., 1]
result['constraints'] = np.stack([c1, c2], axis=-1)
return result
在评估后,目标函数返回一个 dict (Recommended)。 这个结果目录包含:
‘objectives’: 一个 要被最小化目标值 的 列表/元组。 在这个例子中,我们有两个目标,所以这个元组包含两个值。
‘constraints’: 一个含有 约束值 的 列表/元组。 非正的约束值 (“<=0”) 表示可行。
优化#
from openbox import Optimizer
opt = Optimizer(
prob.evaluate,
prob.config_space,
num_objectives=prob.num_objectives,
num_constraints=prob.num_constraints,
max_runs=100,
surrogate_type='gp',
acq_type='ehvic',
acq_optimizer_type='random_scipy',
initial_runs=initial_runs,
init_strategy='sobol',
ref_point=prob.ref_point,
time_limit_per_trial=10,
task_id='moc',
random_state=1,
)
history = opt.run()
这里我们创建一个 Optimizer 实例,并传入目标函数和搜索空间。 其它的参数是:
num_objectives 和 num_constraints 设置目标函数将返回多少目标和约束。在这个例子中,num_objectives=2,num_constraints=2。
max_runs=100 表示优化会进行100轮(优化目标函数100次)。
surrogate_type=‘gp’ 对于数学问题,我们推荐用高斯过程 (‘gp’) 做贝叶斯优化的替代模型。 对于实际问题,比如超参数优化(HPO)问题,我们推荐使用随机森林(‘prf’)。
acq_type=‘ehvic’ 用 EHVIC(Expected Hypervolume Improvement with Constraint) 作为贝叶斯优化的acquisition function。
acq_optimizer_type=‘random_scipy’ 对于数学问题,我们推荐用 ‘random_scipy’ 作为贝叶斯优化的acquisition function。 对于实际问题,比如超参数优化(HPO)问题,我们推荐使用 ‘local_random’ 。
initial_runs 设置在优化循环之前,init_strategy推荐使用的配置数量。
init_strategy=‘sobol’ 设置建议初始配置的策略。
ref_point 指定参考点,它是用于计算超体积的目标的上限。 如果使用EHVI方法,则必须提供参考点。 在实践中,可以1)使用领域知识将参考点设置为略差于目标值的上界,其中上界是每个目标感兴趣的最大可接受值,或者2)使用动态的参考点选择策略。
time_limit_per_trial 为每个目标函数评估设定最大时间预算(单位:秒)。一旦评估时间超过这个限制,目标函数返回一个失败状态。
task_id 用来识别优化过程。
然后,调用 opt.run() 启动优化过程。
可视化#
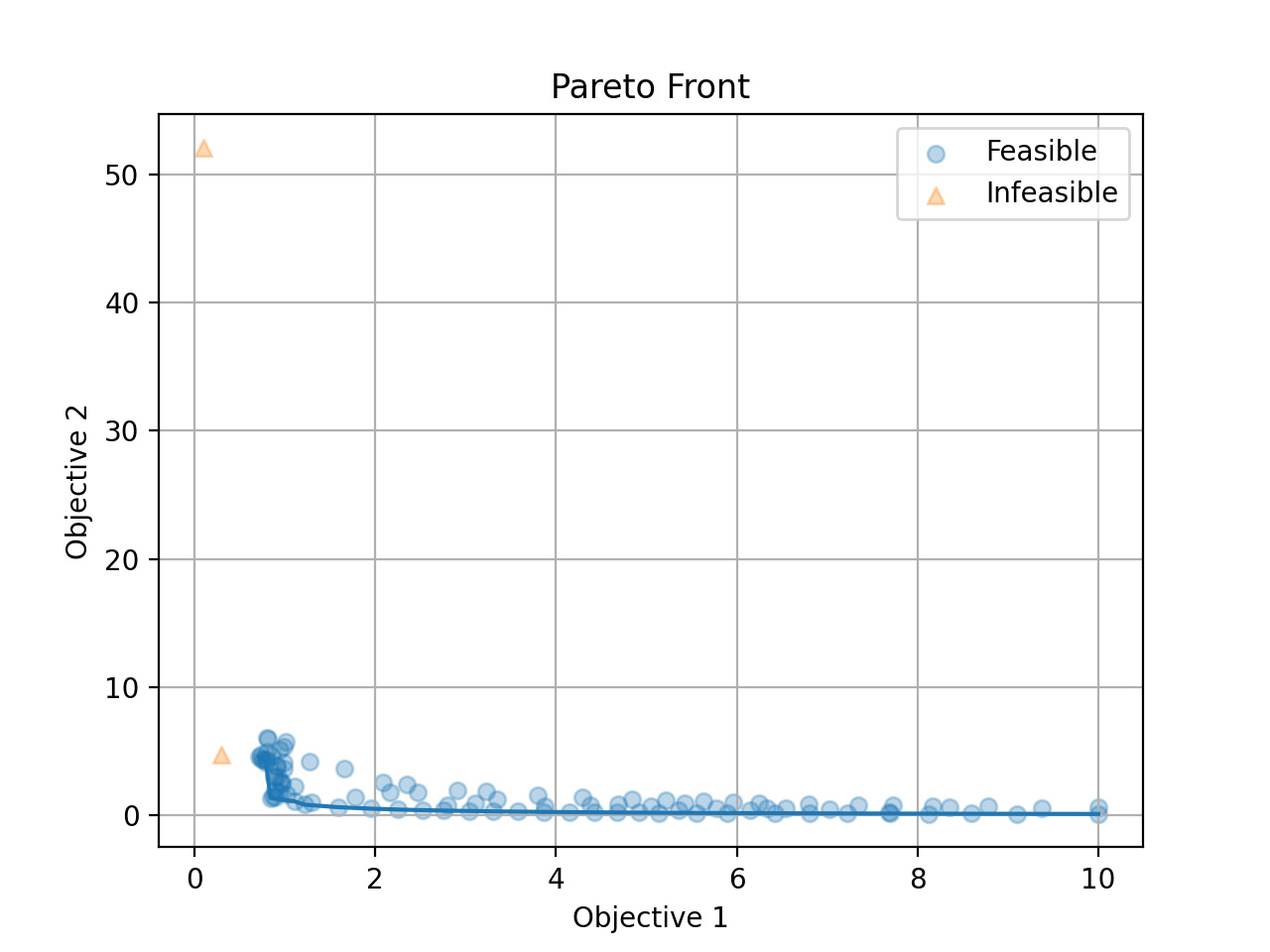
由于我们同时优化了这两个目标,我们得到了一个帕累托前沿(pareto front)作为结果。
调用 opt.get_history().plot_pareto_front() 来绘制帕累托前沿。
请注意,plot_pareto_front只在目标数为2或3时可用。
import matplotlib.pyplot as plt
history = opt.get_history()
# plot pareto front
if history.num_objectives in [2, 3]:
history.plot_pareto_front() # support 2 or 3 objectives
plt.show()
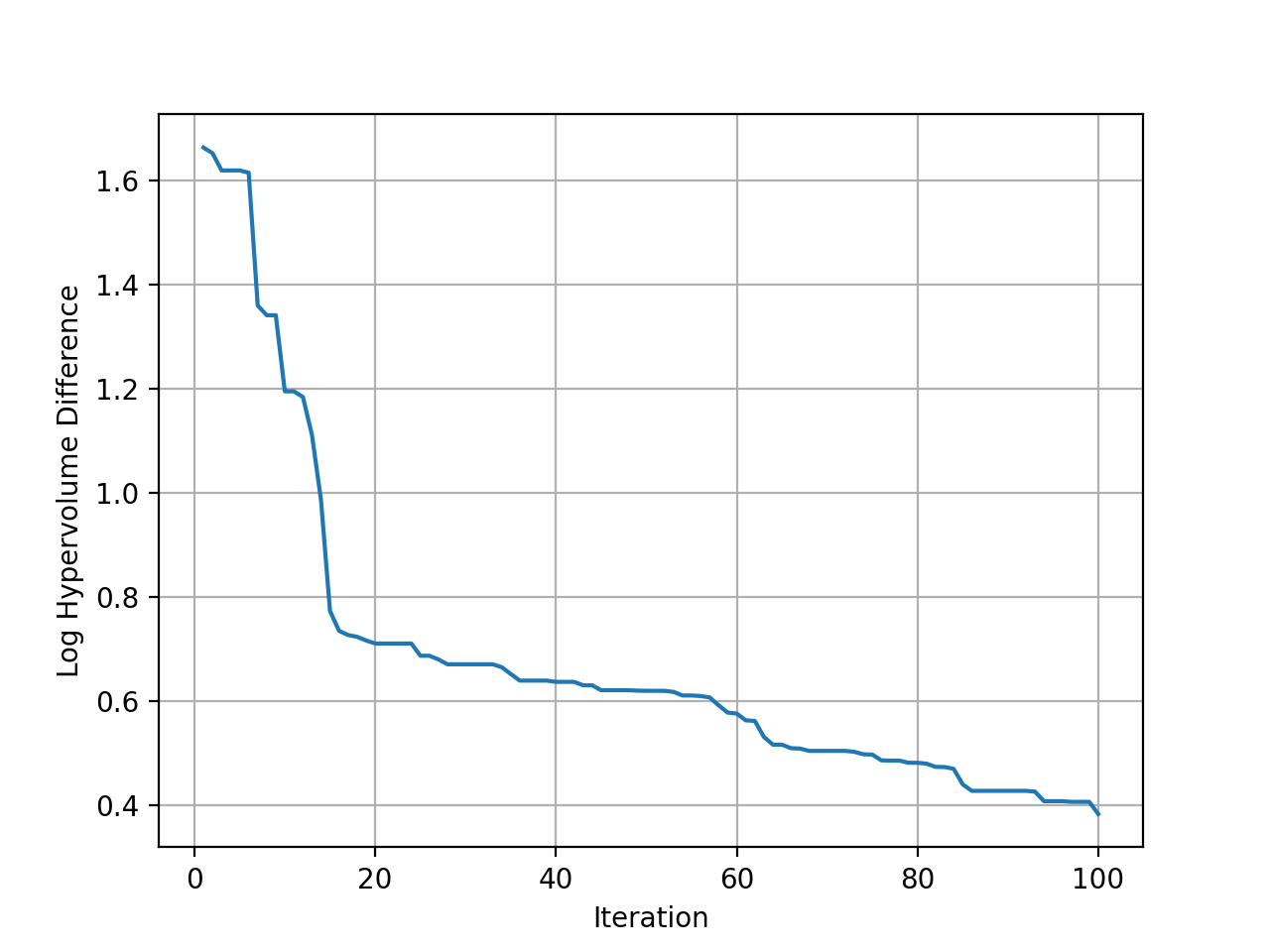
然后绘制优化过程中与理想帕累托前沿相比的hypervolume差。
# plot hypervolume (optimal hypervolume of CONSTR is approximated using NSGA-II)
history.plot_hypervolumes(optimal_hypervolume=92.02004226679216, logy=True)
plt.show()